ИТ - ПЕРсонал
Компания "ИТ-Персонал" специализируется в проектировании, а также оказание консультационных и экспертных услуг в отношении технологий робототехники и сенсорики, в том числе в области сенсоромоторной координации и пространственного позиционирования, сенсоров и обработки сенсорной информации, интеллектуальных систем управления робототехническими системами, систем автоматизации управления, в том числе в отношении беспилотных летательных аппаратов и высокоавтоматизированных транспортных средств.
Предоставляем услуги по настройке, модификации программного обеспечения под торговой маркой "Технодрон" под различные виды БПЛА.
Технодрон - это программное обеспечение, разработанное на базе систем с открытым исходным кодом, что позволяет пользователям получить доступ к нему, изучать его, изменять и распространять модифицированные версии. Это дает гибкость и возможность настраивать систему управления БПЛА под конкретные потребности.
Процесс создания системы управления БПЛА Технодрон включает несколько этапов. Производится модификация программного обеспечения - внесение изменений в исходный код программы для адаптации его под требуемые функциональные возможности и характеристики БПЛА. Модификация может включать добавление новых функций, улучшение существующих или настройку параметров работы.
Затем перепрограммирование системы управления. На этом этапе измененное программное обеспечение загружается на БПЛА, заменяя предыдущую версию программы, что позволяет обновить функциональность и поведение БПЛА согласно внесенным изменениям.
После перепрограммирования следует этап настройки системы управления. Здесь производятся различные настройки, которые позволяют оптимизировать работу БПЛА и обеспечить соответствие его поведения заданным требованиям. Настройка может включать параметры полета, автоматического пилотирования, связи с наземной станцией и другие аспекты работы БПЛА.
Наконец, производится прошивка системы управления. Прошивка представляет собой процесс записи модифицированного программного обеспечения в постоянную память БПЛА, чтобы оно запускалось и исполнялось автоматически при каждом включении аппарата. Таким образом, система управления становится основным программным обеспечением, которое контролирует работу и функционирование всего БПЛА во время полета.
С использованием программного обеспечения с открытым исходным кодом, открываются широкие возможности для разработки и настройки систем управления БПЛА. Открытый код позволяет инженерам и разработчикам глубоко изучать и изменять программное обеспечение, что способствует появлению новых и инновационных решений в области беспилотной авиации.
Работа настроенного программного обеспечения, протестирована на БПЛА геодезического типа
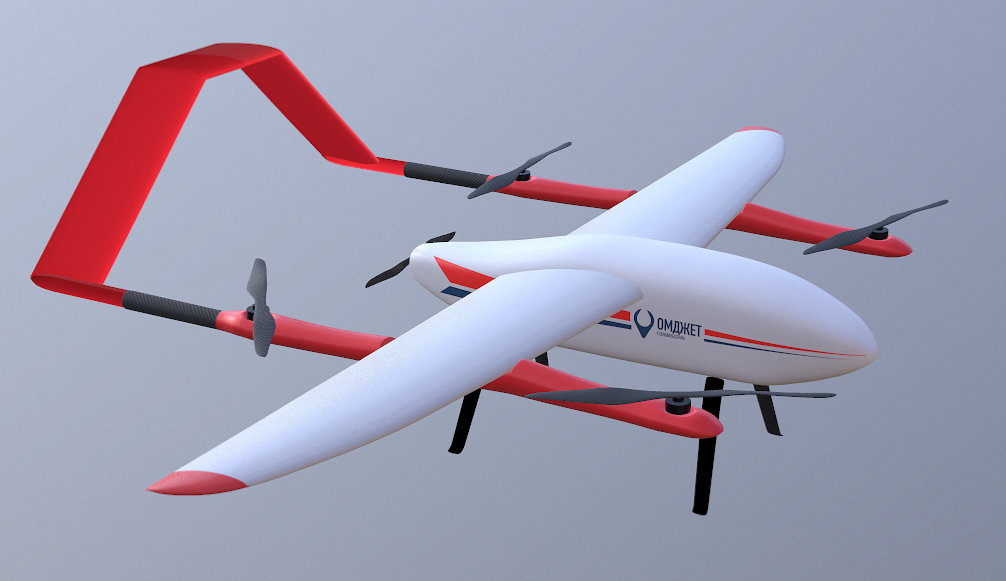
САМОЛЕТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ ОмДжет-АФС-001
Основные ХАРАКТЕРИСТИКИ
Время полета..........................................................................................................................до 130 минут
Скорость полета..........................................................................................................................70-90 км/ч
Максимальная дальность полета.............................................................................................до 150 км
Максимальная масса дополнительной полезной нагрузки...................................................до 3 кг
Скорость ветра не более...................................................................................................................12 м/с
Высота полета................................................................................................................................до 1500м
Температура воздуха для стабильной работы.....................................................................-20...+40 С
Габариты
Длина.................................................................................................................................................1400 мм
Длина фюзеляжа...............................................................................................................................950 мм
Дополнительные
Дальность видеопередачи (опция, в прямой видимости)...................................................до 20 км
Используемые камеры (опция).................................................................Sony A6000, Sony A7R и др.
Функционал
Программное обеспечение для БПЛА (беспилотных летательных аппаратов) Технодрон может включать в себя различный функционал, который помогает планировать и выполнять полеты, связанные с исследованием земной поверхности. Фактический функционал может варьироваться в зависимости от конкретных требований и задач и может быть дополнен или адаптирован в соответствии с потребностями исследователей и операторов БПЛА.
Вот некоторые из возможных функций, которые могут быть включены в такое программное обеспечение:
